Pedestrian RL on Shared Streets
Formulating a pedestrian on a sidewalk-less local street (“이면도로”) as an RL agent, testing whether a safety–efficiency reward trade-off produces emergent walking behavior.
 A tabular Q-learning agent reaches the goal while keeping distance from the shared-lane vehicle.
A tabular Q-learning agent reaches the goal while keeping distance from the shared-lane vehicle.
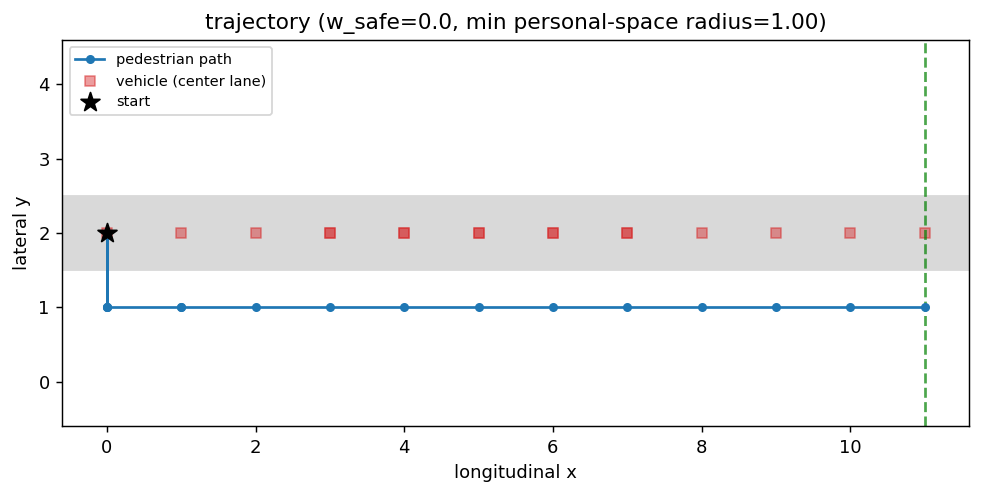 With a low safety weight the agent walks straight through the vehicle lane, minimizing travel time.
With a low safety weight the agent walks straight through the vehicle lane, minimizing travel time.
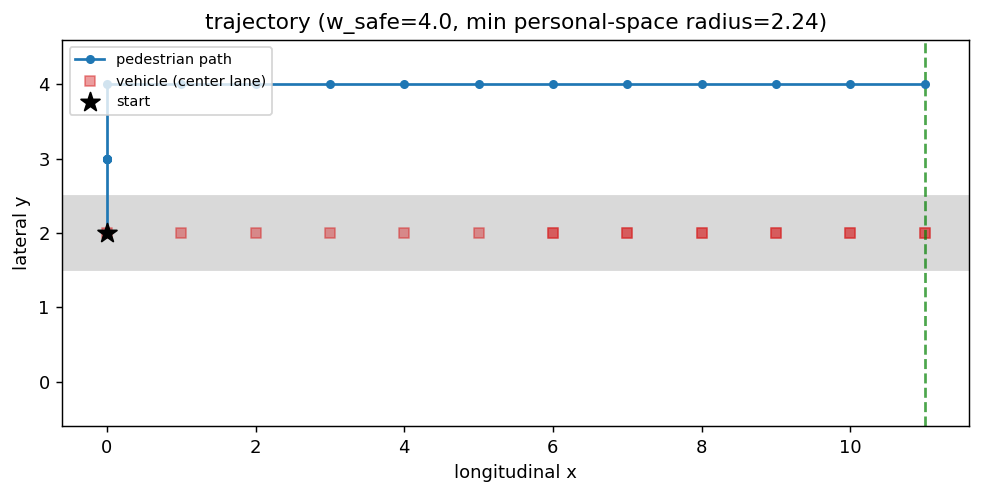 Raising the safety weight makes a personal-space radius (~2.24) emerge, pushing the path to the road edge.
Raising the safety weight makes a personal-space radius (~2.24) emerge, pushing the path to the road edge.
Transit Dispatch Simulation
 A reinforcement-learning agent dispatching vehicles across stations to reduce passenger waiting time.
A reinforcement-learning agent dispatching vehicles across stations to reduce passenger waiting time.
 A reward-shaped gridworld used to train and debug the control policy.
A reward-shaped gridworld used to train and debug the control policy.