Project Overview
Using Vision-Language Models to extract transport-relevant streetscape attributes from open street-level imagery (Mapillary) and aggregate them into interactive maps.
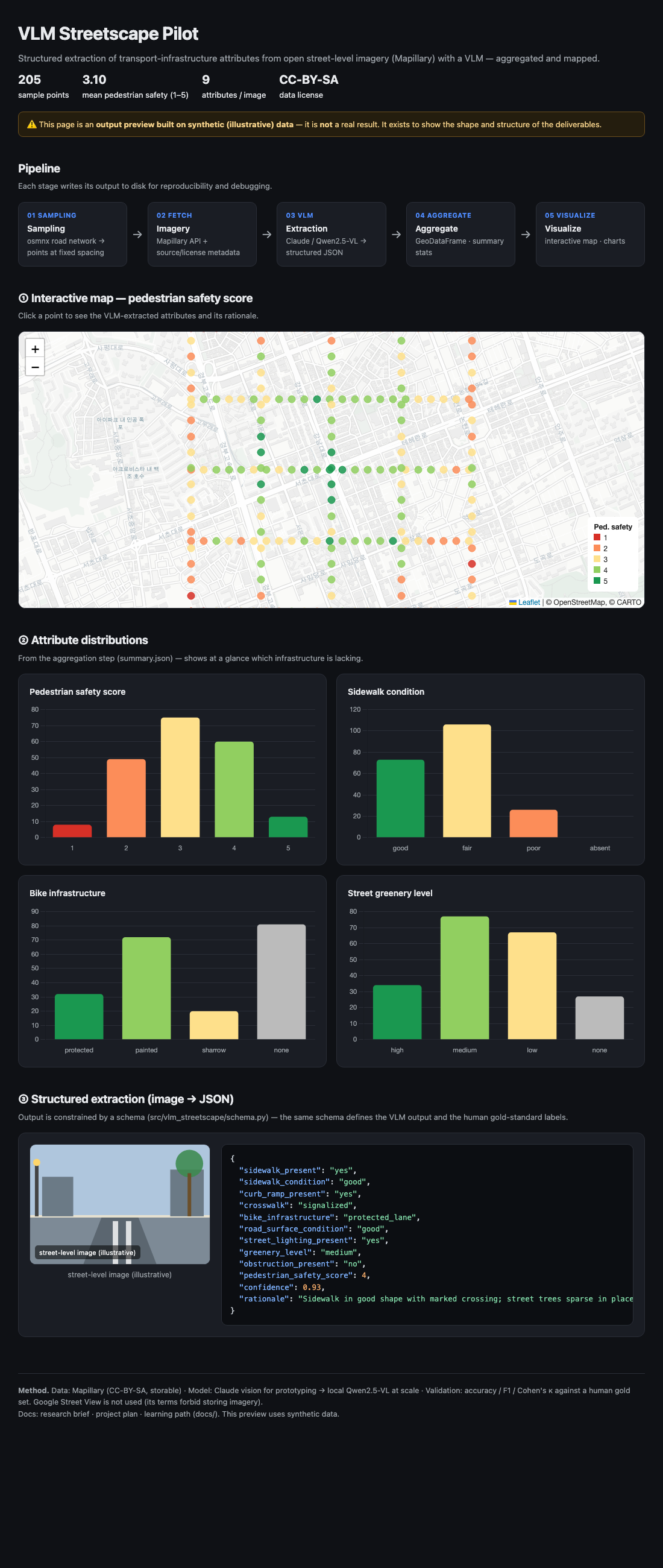 The pipeline from road-network sampling to VLM extraction, mapping, and attribute distributions.
The pipeline from road-network sampling to VLM extraction, mapping, and attribute distributions.
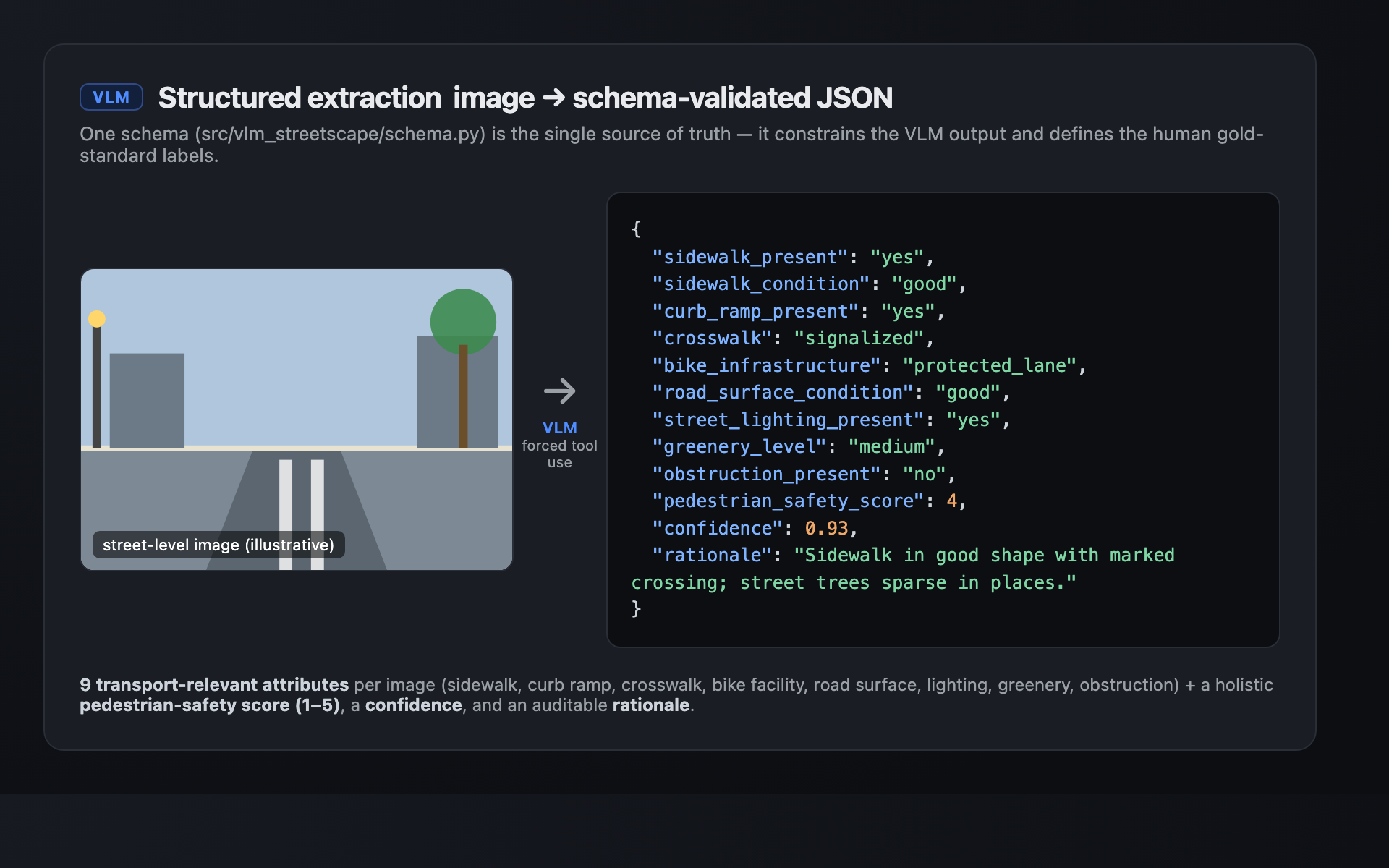 A single schema turns each street image into nine validated attributes plus a pedestrian-safety score.
A single schema turns each street image into nine validated attributes plus a pedestrian-safety score.